Research & Work Experience
PhD student at NC State University, ECE Department
Research:
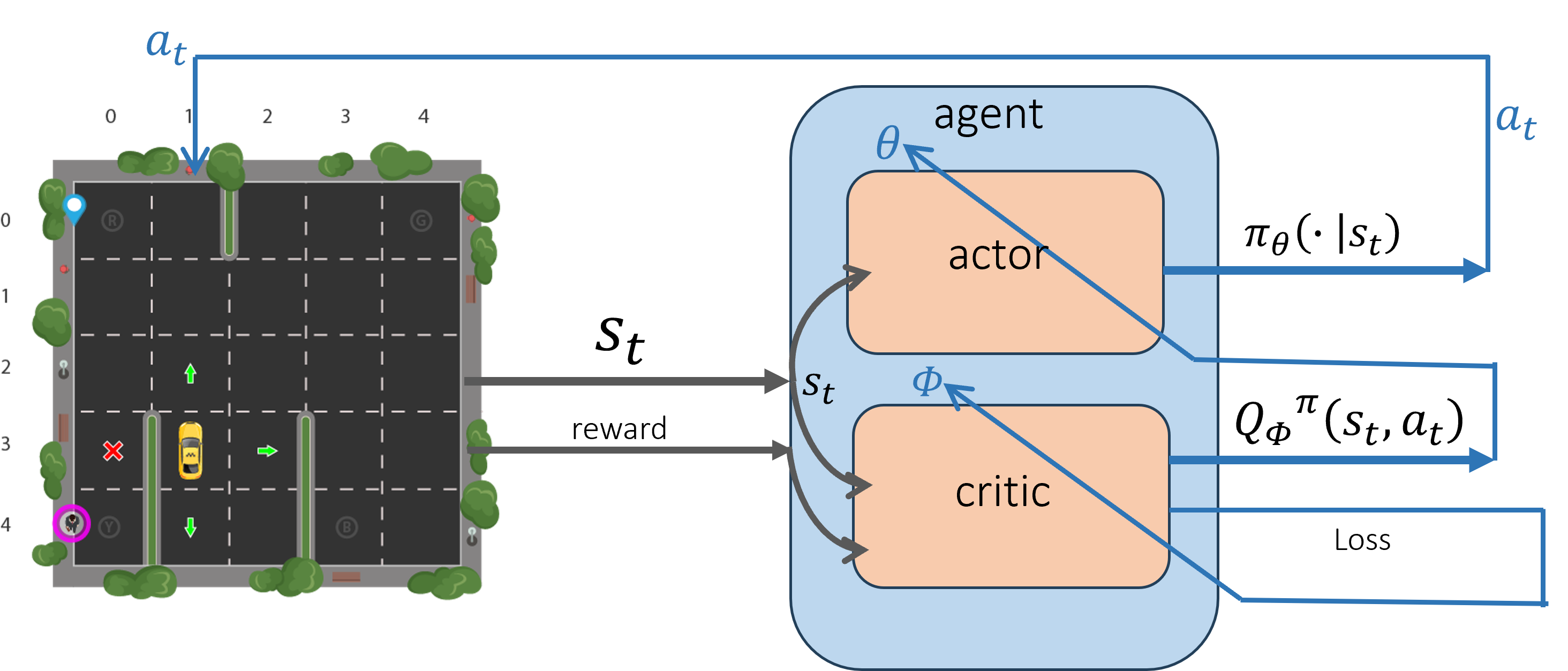
Reinforcement Learning: Studied fundamentals + tried improving Multi-Agent Deep Deterministic Policy Gradient performance using Optimal Transport Theory
 |
-
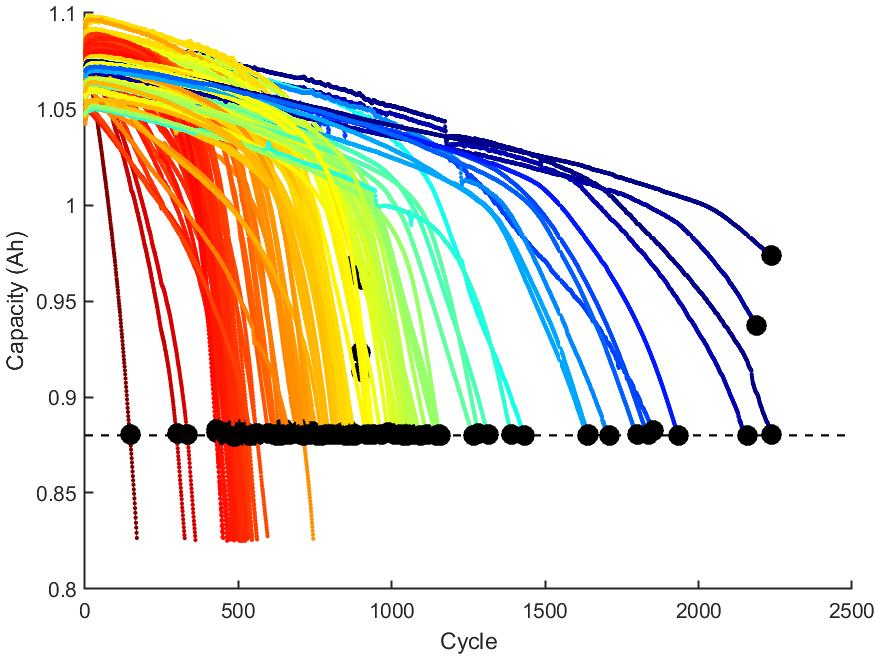
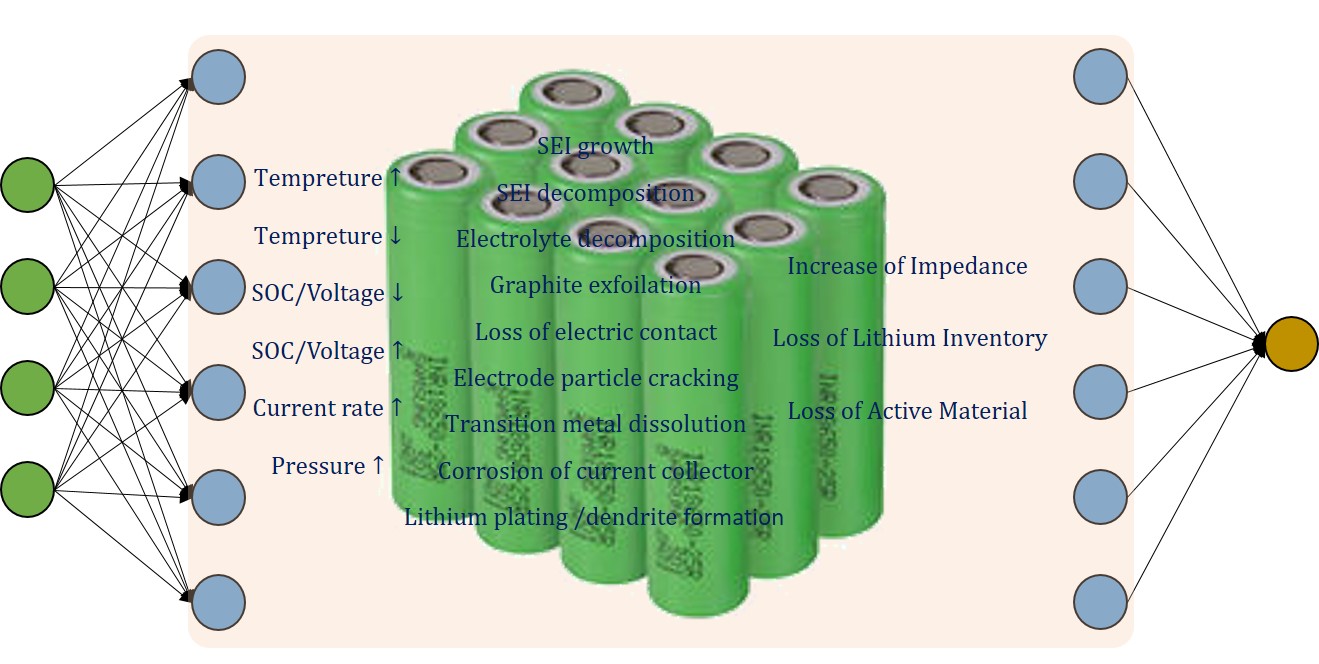
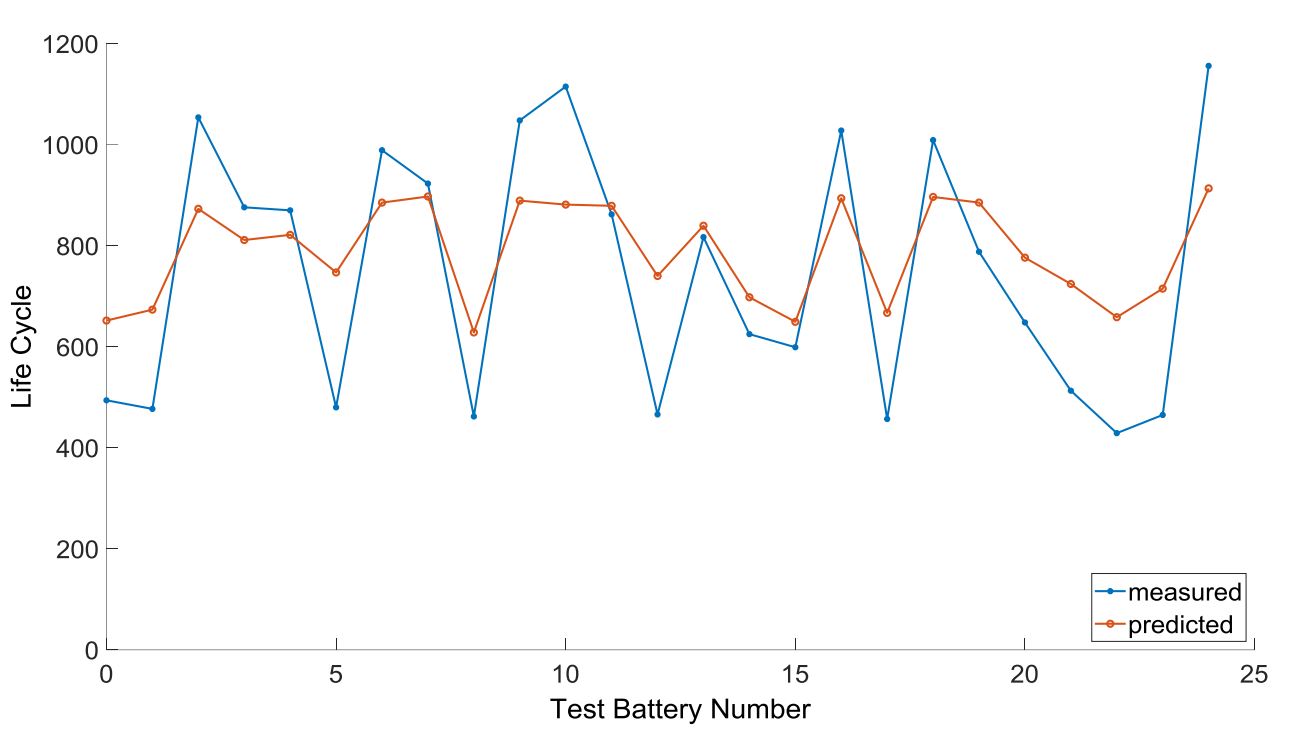
Machine Learning methods applied to Li-ion battery SOH estimation
Teaching assistant:
ECE 308 Elements of Control Systems, Spring 2024, NC State, ECE department
ECE 301 Linear Systems, Fall 2023, NC State, ECE department
ECE 331 Principles of Electrical Engineering, Summer 2023, NC State, ECE department
Courses:
Mathematical Foundations for Large-scale Optimization
Probabilistic Graphical Models
Detection and Estimation Theory
Neural Networks
Functional Analysis 1
Research on Li-ion batteries
Working on Li-ion battery SOH prognosis using machine learning methods
 |
 |
 |
Working on Li-ion battery SOC estimation using Linear Parameter Varying (LPV) approach
Developing a low-cost open-source battery cycler
Investigated and using publicly available Li-ion battery datasets
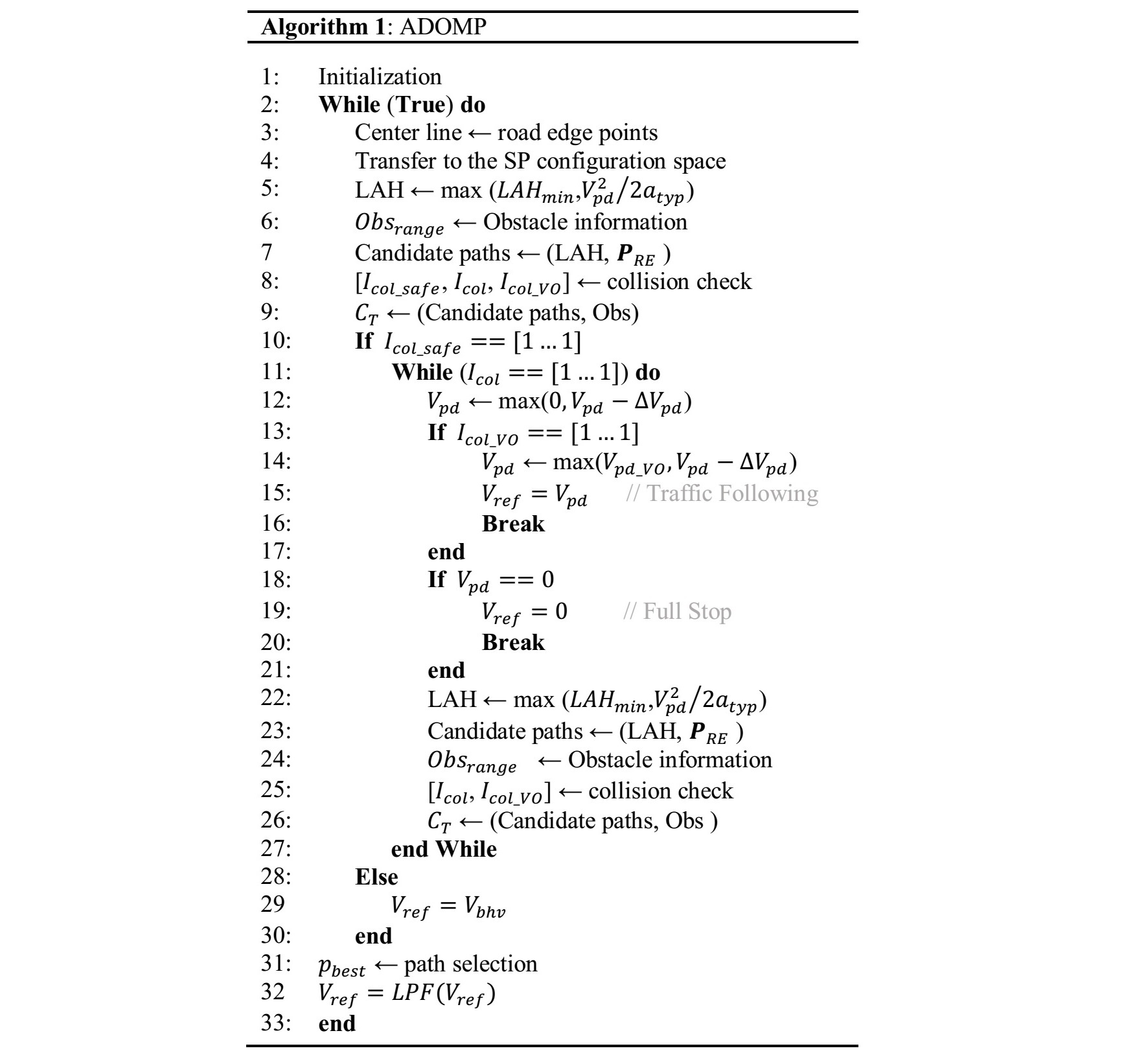
Research on Motion Planning and Control of autonomous vehicles
Preparing MPC control scheme for Robust Throttle Steering of a Drifting Vehicle
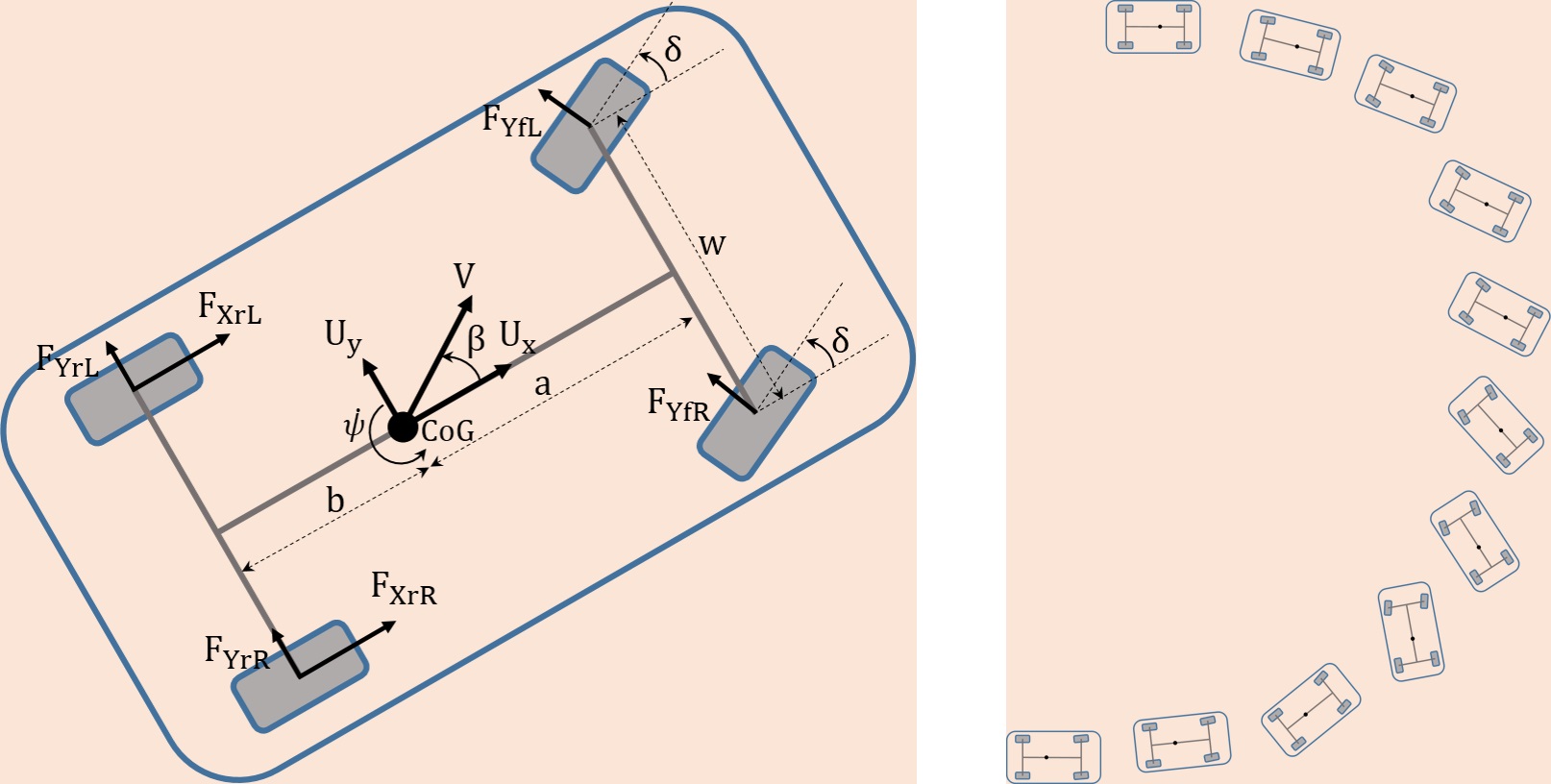 |
Working on Real-time local motion planning for automated driving
 |
 |
 |
 |
Built a 1/10 scale model autonomous car for implementing different algorithms of perception, planning and control of intelligent vehicles
 |
Studied and coded Fundamentals of computer vision
 |
Studied and coded fundamentals of machine learning
Worked on Li-ion batteries at ISRC
Co-designed and prototyped engineering model of a battery pack and its management hardware for CubeSats
 |
Assisted in requirement definition, documentation review, test plan preparation, and testing of Electrical Power System (EPS) modules including battery cells and packs, power modules, and solar arrays
Control and Mechatronics Engineer at SourinTech Company
Developed, with colleagues, a sophisticated controller for SourinTech Co 3-DoF motion simulator (developed in Simulink and run in real-time using TwinCAT)
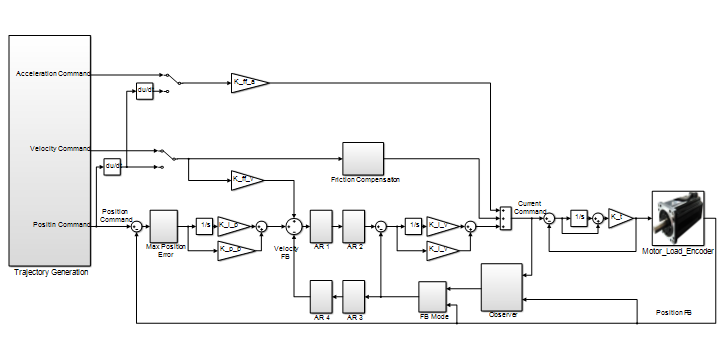 |
Motion trajectory command generation for different motion modes of the simulator
 |
Co-designed electrical and electronic parts of the “CARO” and “SkyPad” racing and flight game simulators
 |
Designed and prototyped an Evaluation Board based on Microchip's dsPIC30F for rapid prototyping
 |
Researching on Satellite Attitude Control Problem
Completed a Thorough Literature Survey on the Attitude Control Problem and Achieved a Good Understanding of the Various Aspects of the Problem
Established a Satellite Attitude and Orbit Simulator in SIMULINK
 |
Developed a high-fidelity model for a reaction wheel including thermal behavior
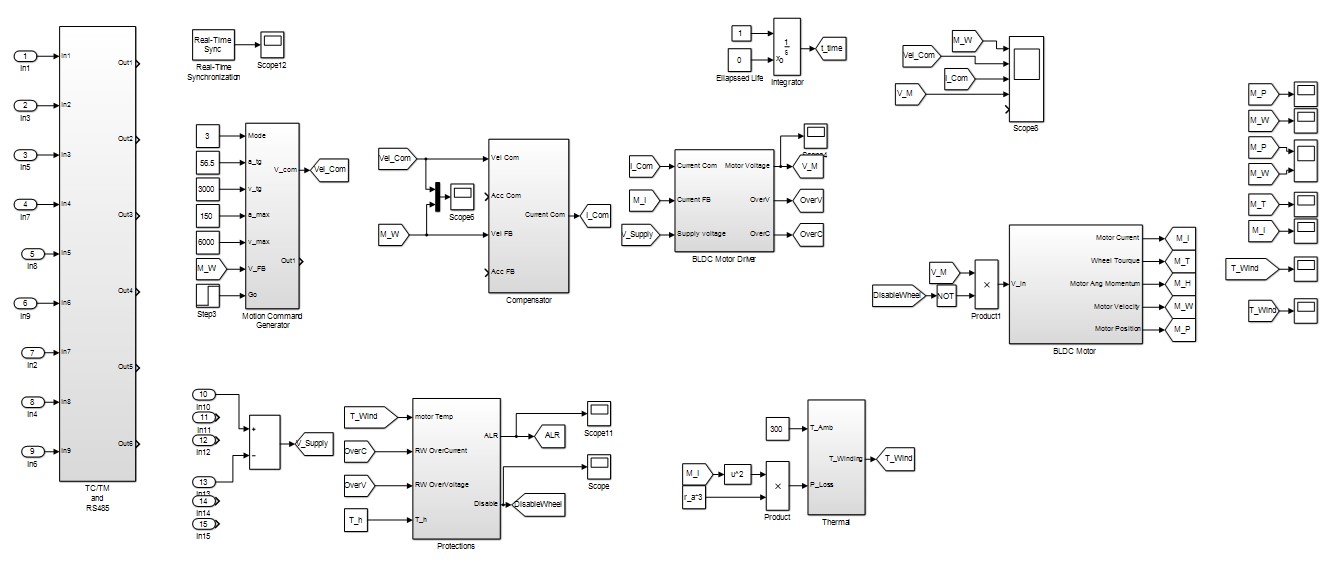 |
Utilized the Multiple Model Approach to Adaptive Control to Improve the Transient Response of Attitude Control System
 |
 |
Investigated the attitude control problem under angular velocity constraints
MSC Thesis Abstract: In this thesis, adaptive control of satellite attitude is considered. In particular, the focus is on spacecraft attitude control under angular velocity constraints. A passivity-based output feedback adaptive attitude control is proposed and then by dividing the parameter space of inertia matrix into smaller subspaces a set of model/controller pairs is achieved. The transient response of the proposed controller is significantly improved by switching between pairs based on a performance criteria in term of quaternion error. Asymptotically stability of the non-adaptive case of proposed controller without switching is proved. A spacecraft orbit and attitude simulator is developed and used to evaluate the performance of proposed algorithm. In addition, a robust attitude control law is also proposed which is robust against bounded time-varying disturbances and its stability is proved using Lyapunov second method. The transient response of this control law is also improved utilizing multiple model approach. In contrast to the first algorithm which uses switching to determine the overall control input, this algorithm uses a convex combination of all control inputs as the overall control input to apply to the plant. The performance of this algorithm is also simulated.
Coordinator of biweekly seminars of Control and Systems Engineering department of K. N. Toosi University of Technology
Electrical Engineer at ParsaFan Electronic Nasir Co·
 |
|
Electrical Engineer at Yar Nikan Saleh Co·
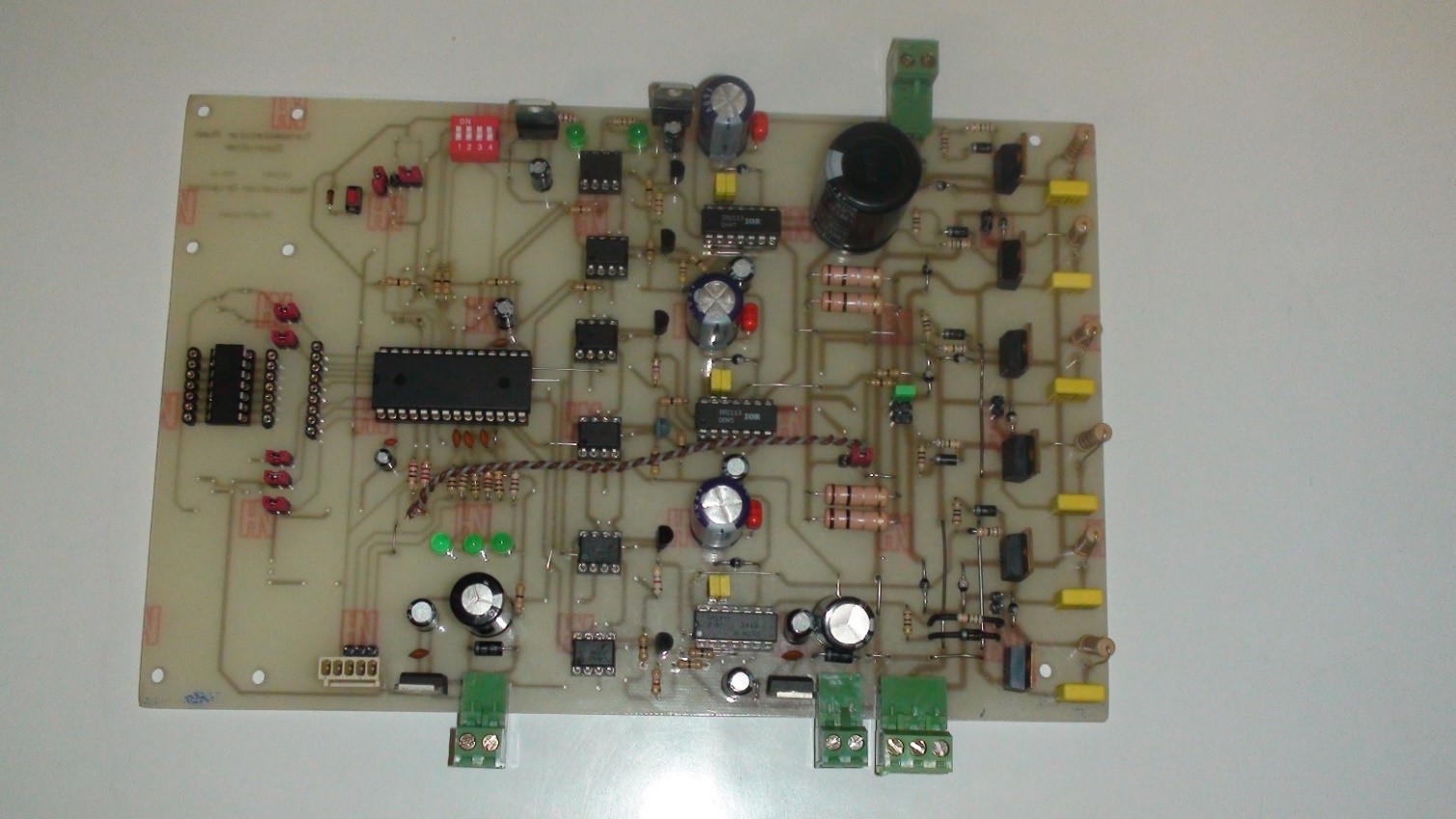
Design and prototyping of turbo molecular pump controller with BLDC motor
Design, prototyping, and manufacturing of automatic system for vacuum valves
 |
 |
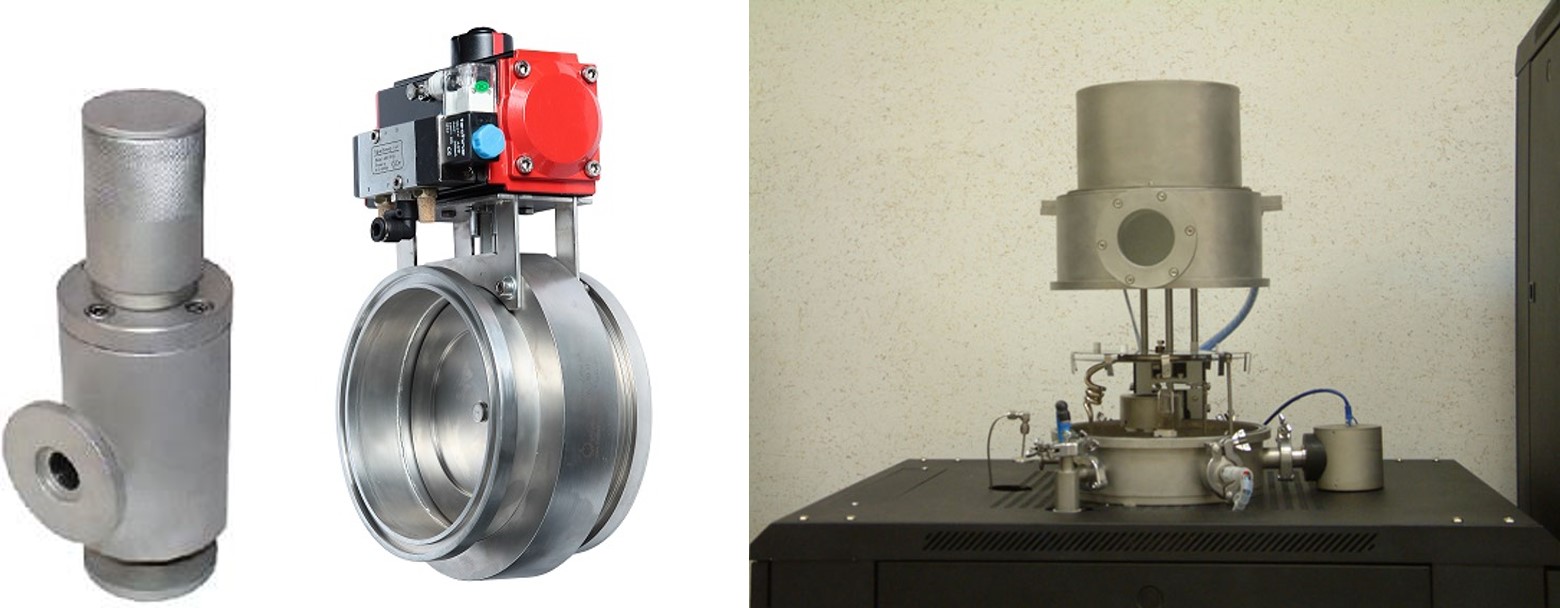 |